- ホーム
- ニュースリリース
- ニュースリリースアーカイブ
- 2022年度11月一覧
- 日本発の自動運転システムの「シナリオに基づく安全性評価フレームワーク」に関する国際標準が発行されました
日本発の自動運転システムの「シナリオに基づく安全性評価フレームワーク」に関する国際標準が発行されました
~安全で自由に移動できる社会の実現を目指して(ISO 34502)~
2022年11月16日
この度、自動運転システムの安全性を評価するための手順やシナリオに関する、日本発の国際標準が発行されました。これにより、自動運転システムの安全性と開発効率の向上が期待されます。
1.背景
自動運転車両は環境負荷の低減、交通事故の削減、交通渋滞の緩和等、様々な社会課題を解決することに加え、自動車産業の国際競争力を向上させることが期待されております。自動運転システムの安全性能に対する評価を、国際的に統一された指標で実施することで、より安全、効率的で自由なモビリティ社会の実現に貢献します。
従来の運転支援システム開発では様々な環境で実際に長期間走行する試験や、各国のプロジェクトで検討された事故データ、ドライブレコーダ等の実環境の計測データから、「シナリオ」(例えば走行環境と、交通参加者によるカットイン、カットアウトなどの挙動などの相互関係等を、複数にわたって整理したもの)をシミュレーション等で再現する試験を行ってきました。これらの試験結果やデータを自動運転システムの安全性検証へ適用するためには交通参加者の速度や距離などの検証範囲をどこまで定めるかや、評価するシナリオに過不足がないかという点などが課題として挙げられます。
そこで、これらの課題を解決するため、日本から具体的なシナリオに基づく安全性の評価手順を含む、ISO 34502を提案し、2022年11月2日に発行されました*1。
2.標準の概要
本標準は、自動運転システムの安全性を評価する手順や、クリティカルシナリオ(自車にとって危険と認知した場合に即座に安全行動を行う必要がある事象)の導出手法等から構成されております。(図1)
①安全目標の設定(例えば有能なドライバーより優秀である)②シナリオ検証範囲の設定(例えば交通参加者の速度範囲等)
③危険な事象に至る要因(例えば自車と他車との相対速度や車間距離)及び②シナリオ検証範囲からクリティカルシナリオの特定
④安全性試験・評価を実施
⑤①で設定した安全目標を達成しているか判断
⑥⑤で未達成の場合、自動運転システムの再検討を要求し、①に戻る(反復ループ)

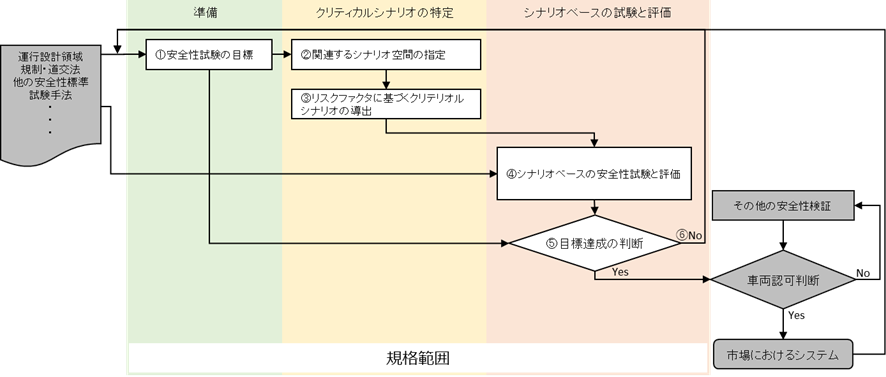
図1:ISO 34502で規定された安全性評価の全体的な流れ
日本提案の特徴は、クリティカルシナリオの導出手法について、より実現可能な「シナリオベースアプローチ」を提案した点にあります。これは、自動運転システムの各要素を「認知」、「判断」、「操作」の3要素に分解し、それぞれの危険に繋がる事象を体系的に整理する事で、シナリオを漏れなく導出する手法です。(図2)
シナリオの種類が無限に近くなった場合、最適な検証作業に支障をきたしますが、このアプローチによって、安全性保証にとって必要十分なシナリオを、過不足なく検討することが容易になります。

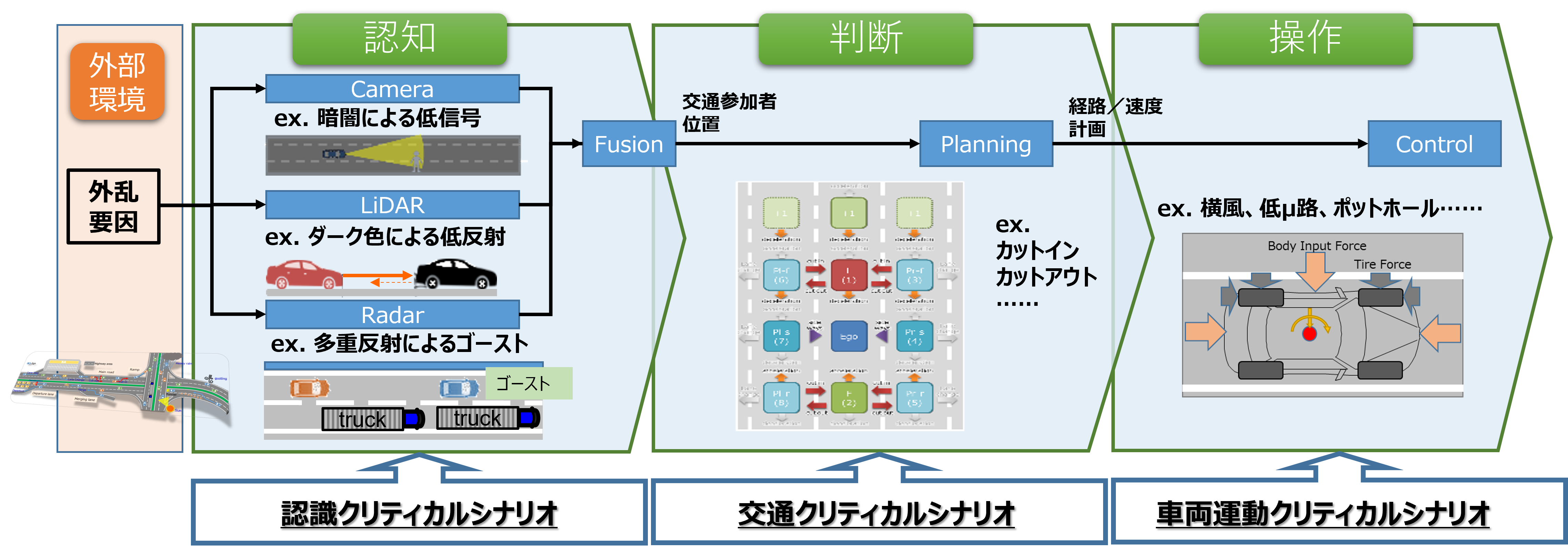
図2:シナリオの体系化
3.期待される効果
自動運転システムを開発する上で、開発プロセスの企画・設計・評価の各フェーズで安全性を評価及び検証する際の共通基盤として、ISO 34502を活用することにより、安全性及び開発効率の向上が図れます。さらに、自動運転システムが満たすべき安全性の要件を明確化することで、社会受容性の向上も期待されます。
ISO 34502:2022 Road vehicles — Test scenarios for automated driving systems — Scenario based safety evaluation framework
*2 SAKURAプロジェクト;Safety Assurance KUdos for Reliable Autonomous Vehicles
関連リンク
担当
- 国際標準について
産業技術環境局 国際標準課長 渡辺
担当者:田中、青山、野口電話:03-3501-9283(直通)
03-3501-8625(FAX) SAKURAプロジェクトについて
製造産業局自動車課
ITS・自動走行推進室長 福永
担当者:秋元、芝、奥野電話:03-3501-1690(直通)
03- 3501-6691(FAX)